罗盘误差及补偿
文章插图
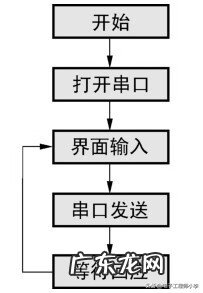
图21.9 PC端软件流程图

文章插图
图21.10 PC 端软件界面

文章插图
图21.11 有无干扰时的罗盘输出
造成罗盘误差的主要因素有传感器误差、其他磁材料干扰等 。为了校准传感器放大电路,HMC5883 内部集成了自测试电路,可以驱动偏置电流带产生一定大小的测试磁场,以校准传感器各轴灵敏度 。自测试还可以校准温度变化产生的漂移 。当磁阻传感器处于较强干扰磁场中时,传感器灵敏度会下降甚至失效 。为了消除这种影响,需要复位/置位电路施加脉冲宽度为2μs、电流强度为3~4A的电流,使传感器特性恢复 。在目前应用较为广泛的HMC1022及HMC1022 模拟输出磁阻传感器中,复位/置位电路需要额外设计并由控制器控制,而HMC5883 芯片内部集成了生成复位/置位脉冲所需的驱动电路,且由片上ASIC 电路自动控制,在每次测量前自动进行复位/置位操作,不仅保证了传感器精度,也使传感器应用电路大为简化 。
除了传感器本身的误差,磁阻传感器应用环境中的磁介质引起的磁场变化也会使电子罗盘精度降低 。磁场干扰分硬磁干扰和软干扰两类 。硬磁干扰是传感器附近的永磁体或被磁化的金属造成的,它对磁阻传感器输出的影响是固定的,使输出曲线图圆心偏移,如图21.11(b)所示 。而软磁干扰则是地球磁场和传感器附近磁性材料的相互作用造成的,其干扰具有方向性,如图21.11(c)所示 。
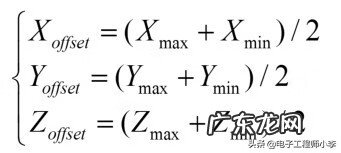
为了校正X、Y轴方向的硬磁干扰,需要在校准模式中绕Z轴缓缓旋转罗盘一周,在旋转过程中,罗盘不断采集X、Y轴的磁场强度数据,最终找出数据的最大值Xmax、Ymax和最小值Xmin、Ymin 。对于Z轴的校准,需要绕X轴或Y轴旋转一周,找出Z轴数据的最大值Zmax、最小值Zmin 。校准偏移量为:
文章插图
将偏移量保存到控制器的EEPROM存储器中,在以后的每次测量中,将每轴的磁场强度减去对应的偏移量,即可校准硬磁干扰 。消除软磁干扰的补偿算法较为复杂,在低成本的控制器上不易实现且效果有限,因此在本设计中选用了优化磁阻传感器安装位置的方法,以降低其他磁性材料对地磁场的干扰,保证罗盘精度 。
总结本文依据磁罗盘测向原理,设计了具有倾斜补偿功能的小体积、低功耗数字罗盘 。该罗盘采用数字磁阻传感器HMC5883L及超低功耗处理器ATmega16L,具有电路结构简单、集成度高、抗干扰能力强等优点 。实验证明,经算法补偿后,该电子罗盘精度可以达到±1° 。由于硬件成本低、功耗小,它也适用于便携导航、小型飞行器控制,以及用于其他需要测量倾角和方位角的场合 。
- 进门见楼梯风水 进门见楼梯的风水
- 坎为水变风水涣婚姻 风水涣测婚姻的故事
- 建筑八大员哪个最吃香 建筑师
- 胆囊炎如何治疗最佳 胆囊炎治疗最好的方法
- 天冬是什么样子的 天冬是什么东西
- 伊利羊奶粉价格表 伊利奶粉价格表图片
- 家常爆米花做法 爆米花的做法和步骤
- 生育年龄 女性最佳生育年龄段
- 转基因食品对人的危害 转基因食品的危害有哪些
- 女性安全期怎么算时间 女人的安全期是啥时候
特别声明:本站内容均来自网友提供或互联网,仅供参考,请勿用于商业和其他非法用途。如果侵犯了您的权益请与我们联系,我们将在24小时内删除。