表达由机器人位置 (x, y) 引起的对路标预测误差误差

文章插图
对路标的预测对路标坐标的 Jacobian

文章插图
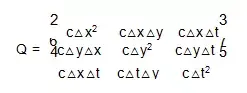
3.8 过程噪声 Q 和 W
过程噪声是与控制信号成比例的高斯噪声 , 记作 Q 。如果

文章插图
C 与里程计的准确性有关 , 准确性高对应的系数就大 , 通常是需要实验调参的 。
3.9 测量噪声: R 和 V
观测噪声是与路标测量 (range,bearing)有关的 2×2 矩阵 ,
形如

文章插图
其中 r 与 range 有关 , c 是常数 , 如果 range 误差 1cm , c 应该取值 0.01 , 表示高斯噪声方差 。
如果 bearing 误差 1 度 , b=1 。
常数与测量设备的准确性有关 。
有了上面几个关键矩阵的铺垫 , 下面终于 EKF 流程了:
3.10 使用里程计更新系统当前状态
更新的是状态矩阵 X(1.3.2) 前 3 个量

文章插图

文章插图

文章插图
3.11 更新预测模型 Jacobian

文章插图
3.12 更新过程噪声
过程噪声是与控制紧密相关的 。
文章插图
3.13 更新机器人位姿有关的协方差
(协方差矩阵顶部 3 × 3) 块 。

文章插图

文章插图
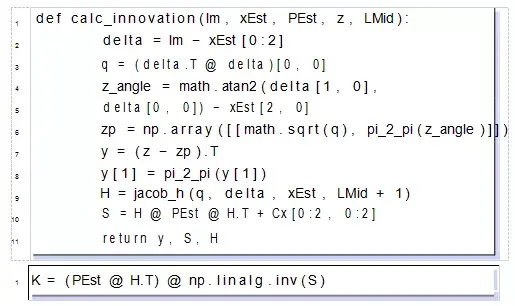
3.14 用重新观测的路标数据更新当前状态
预测路标
仅从机器人位置信息更新状态是不够准确的 , 还可以通过对路 标点的重新观测修正机器人位姿 。对于机器人当前位姿 (x, y) 和上一时刻路 标坐标 (λx, λy) 可以计算距离和角度 h:

文章插图

文章插图
还可以直接通过传感器计算路标 。

文章插图
3.15 更新测量误差矩阵 R , V

文章插图
其中 r = range, c = 0.01, bd = 1
3.16 计算 kalman 增益

文章插图
文章插图
3.17 新的状态向量

文章插图
3.18 把新的路标加入状态
用新的路标点更新状态向量 X

文章插图
3.19 更新协方差矩阵
更新协方差矩阵 P: 对角线元素

文章插图
更新协方差矩阵 P: 机器人-路标相关元素
- 顶级风水宝地 至尊蓝月风水宝地
- 各种牡丹寓意和象征风水 蓝色牡丹寓意风水好吗
- 世界十大地理奇观欣赏:伯利兹蓝洞上榜,石浪居第一位
- 富德无线鼠标连接方法 蓝牙鼠标怎么连接电脑呢
- 蓝色钱包真的不好吗 蓝色钱包有风水吗吗
- 为什么有人眼白是淡蓝色 白眼球发蓝图片
- 2022长安cs75蓝鲸版1.5t配6at 长安cs75价格及图片大全新款怎么样
- 江西蓝天学校 江西南昌蓝天学院校长
- 世界罕见的十大天文现象盘点:日全食蓝月亮均上榜
- 看完就知道该咋办了 带的蓝牙入耳式耳机老是滑出来怎么办
特别声明:本站内容均来自网友提供或互联网,仅供参考,请勿用于商业和其他非法用途。如果侵犯了您的权益请与我们联系,我们将在24小时内删除。