机器之心报道
编辑:蛋酱、小舟
今天 , CoRL 2021 公布了全部论文奖项 , 来自 MIT CSAIL 的研究摘得了本届 CoRL 大会的最佳论文奖 , 论文作者包括 Tao Chen、Jie Xu 两位华人学者;哥伦比亚大学计算机科学系 Huy Ha、Shuran Song 的研究获得了最佳系统论文奖 。【CoRL 2021奖项公布,MIT华人博士生获最佳论文,本科毕业于上交大、清华】
文章图片
北京时间 11 月 9 日 , CoRL 2021 在英国伦敦和线上同时开幕 。
自 2017 年首次举办以来 , CoRL 已经成为了机器人学与机器学习交叉领域的全球顶级学术会议之一 。 CoRL 是面向机器人学习研究的 single-track 会议 , 涵盖机器人学、机器学习和控制等多个主题 , 包括理论与应用 。
今天 , CoRL 2021 公布了最佳论文奖、最佳系统论文奖 。 来自 MIT CSAIL 的研究《A System for General In-Hand Object Re-Orientation》获得 CoRL 2021 最佳论文奖 , 作者包括两位 MIT 博士生 Tao Chen、Jie Xu 和 MIT 电气工程与计算机科学系助理教授 Pulkit Agrawal 。 哥伦比亚大学计算机科学系的研究《FlingBot: The Unreasonable Effectiveness of Dynamic Manipulation for Cloth Unfoldin_g_》获得了最佳系统论文奖 , 作者为哥伦比亚大学计算机科学系助理教授 Shuran Song 和哥伦比亚大学计算机科学系博士生 Huy Ha 。
最佳论文奖
文章图片
论文标题:A System for General In-Hand Object Re-Orientation
作者:Tao Chen, Jie Xu, Pulkit Agrawal
论文链接:https://arxiv.org/abs/2111.03043
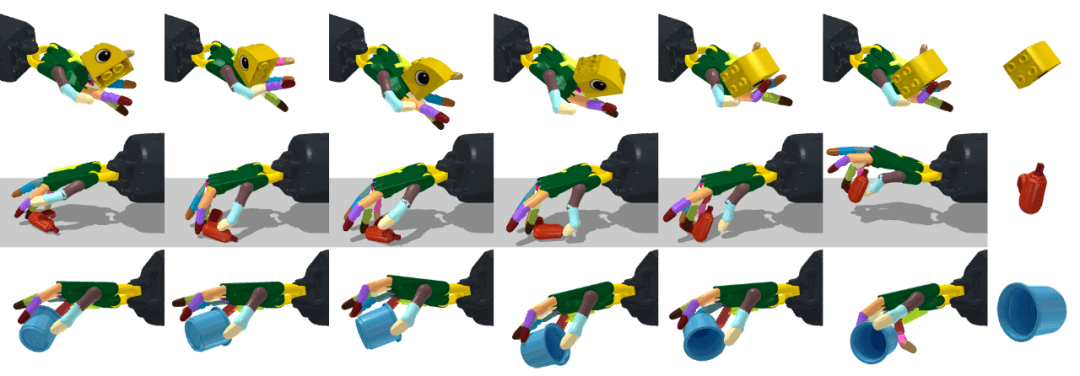
论文摘要:由于高维驱动空间以及手指与物体之间接触状态的频繁变化 , 手持物体的重定向一直是机器人技术中一个具有挑战性的问题 。 该研究提出了一个简单的无模型框架 , 该框架可以在机器手向上和向下的情况下学会对物体重定向 。 该研究展示了在这两种情况下重定向 2000 多个几何形状不同的物体的能力 。 学得的策略在新物体对象上显示出强大的零样本迁移性能 。 该研究表明可以使用在现实世界中易获得的观察结果来提炼这些策略 , 使其适应实际生活中的日常操作 。
文章图片
研究者试图寻求让机器复制人类能力的方法 , 他们创建了一个更大的框架:一个可以用机械手重定向 2000 多个不同物体的系统 , 包括手掌心朝上和朝下的情况 。 这种从杯子、金枪鱼罐头、Cheez-It 盒子到任何东西的操纵能力 , 可以帮助机械手以特定的方式和位置快速拾取和放置物体 , 甚至可以推广到看不见的物体 。
文章图片
「在工业中 , 平行颚爪最常用 , 部分原因是它的控制简单 , 但在物理上它无法操纵我们日常生活中看到的许多工具 , 」作者之一 Tao Chen 表示 。 「即使用钳子也很困难 , 因为它不能灵巧地来回移动一个手柄 。 我们的系统能让多指机械手灵巧地操纵这些工具 , 这为机器人应用开辟了一个新领域 。 」
虽然看似违反直觉 , 但单个控制器(称作机器人大脑)可以重定向很多它以前从未见过的物体 , 并且是在不知道形状的前提下 。 「我们最初认为 , 在机器人操纵物体时推断形状的视觉感知算法将是主要挑战 , 」麻省理工学院教授 Pulkit Agrawal 说 。 「相反 , 研究结果表明 , 人们可以学习与形状无关的强大控制策略 。 这表明视觉感知对于操纵可能远没有我们习惯思考的重要 , 更简单的感知处理策略可能就足够了 。 」
特别声明:本站内容均来自网友提供或互联网,仅供参考,请勿用于商业和其他非法用途。如果侵犯了您的权益请与我们联系,我们将在24小时内删除。