一、在FX3G PLC中定位程序的:
以Y0输出为例进行说明:
1、基础参数:最高速度[Hz] D8343 D8344,基地速度[Hz] D8342,伺服加速时间[ms] D8348,伺服减速时间[ms] D8349;根据伺服系统参数设置,不设置也可以,系统通常会有默认设置;
详细参数见下图:

文章插图
定位相关参数
2、伺服限位:正限位 M8343,负限位 M8344,在执行伺服定位时,如果触发正负限位任何一个伺服都会停止脉冲输出,伺服停止 。
3、伺服回原点:原点回归指令(16位)ZRN,原点回归指令(32位)DZRN,带DOG搜索的原点回归指令 DSZR;回零指令中有回零速度,爬行速度,原点,近点信号,脉冲信号;
4、伺服定位:相对定位指令DRVI ,绝对定位指令DRVA;DDRVI和DDRVA为32位定位指令;
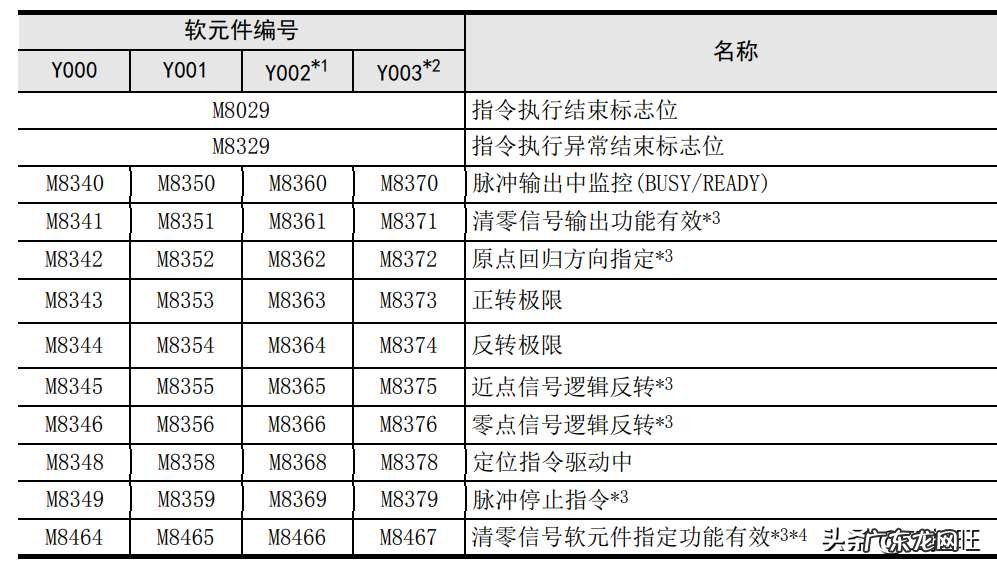
5、相关特殊寄存器:指令执行结束 M8029;指令执行异常 M8329;脉冲停止 M8349 ;
脉冲输出中 M8340;伺服当前值:D8340 D8341
文章插图
二、三菱PLC中高速计数器在定位运动中的使用案例
三菱FX PLC中前几个X输入端通常为高速输入端,可以接受高频脉冲输入(比如增量式编码器),当然也可以作为普通的开关量输入端(比如感应器的通断) 。
举个非常简单的例子说明高速计数器在定位运动中的应用:
通过气缸来实现简单的定位控制,主要是通过控制电磁阀的通断间接实现气缸的伸出量,伸出量的多少是通过外界的光栅卡尺反馈的栅格脉冲数,脉冲的检测是通过外接的U型光电感应器,卡尺的结构很简单(类似于编码器),主要是为了说明问题,方便大家理解 。具体系统组成看下图:

文章插图
气缸定位控制的简单系统示意图
在三菱PLC梯形图中的编程如下所示:

文章插图
气缸定位控制程序
程序解释说明:光电感应器信号接在X0端,X0可以接受高速变化的脉冲,对应的高速计数器为C235为32位数据类型;气缸在原位时,复位C235内部数据;可以通过修改D100 D101中的数值实现对气缸伸出量的控制;利用高速计数器C235的好处就是,当气缸变化很快时,卡尺的脉冲变化普通计数方式根本无法统计会发生丢失严重现象,通过高速脉冲复位指令DHSCR实现对Y输出的快速响应,使气缸迅速停止输出 。电磁阀的选用最好是保压型,或者直接假装一个可以使气压停止输出的装置 。
三、三菱PLC高速计数器C253的使用场合及说明
高速计数器和普通计数器的区别:
字面意思理解就是普通计数器只能用来统计反应速度比较慢的信号,比如通常在自动化设备生产产品的时候,每间隔几秒时间,甚至是几十毫秒,需要进行数据累加,通常使用C0,C1等等普通计数器 。当PLC需要1秒计数60 000 次时,就只能用高速计数器了,比如C235,C236等等 。
三菱PLC中高速计数器分为软件计数和硬件计数,可以通过特殊的软元件进行切换,高速计数器根据输入方式的不同又分为:单相单计数,单相双计数,双向双计数 。
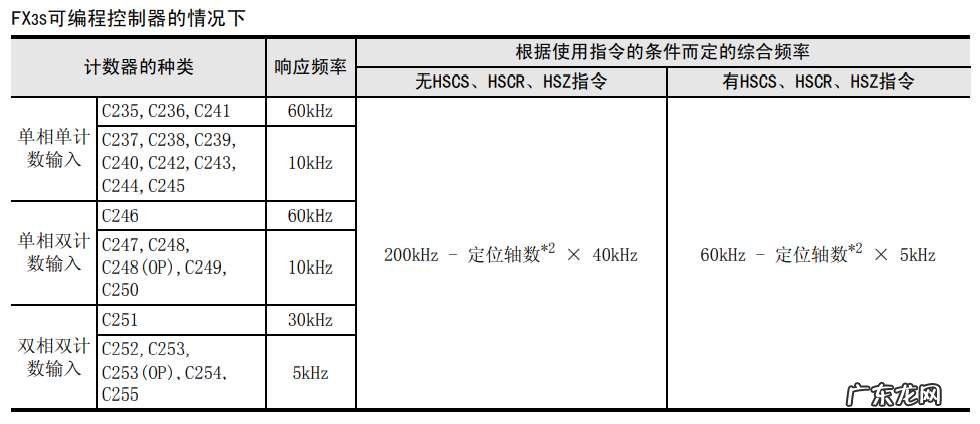
三菱FX PLC中高速计数器响应频率参考如下:(不同类型PLC参照相应手册)
文章插图
FX 3G中高速计数器响应频率
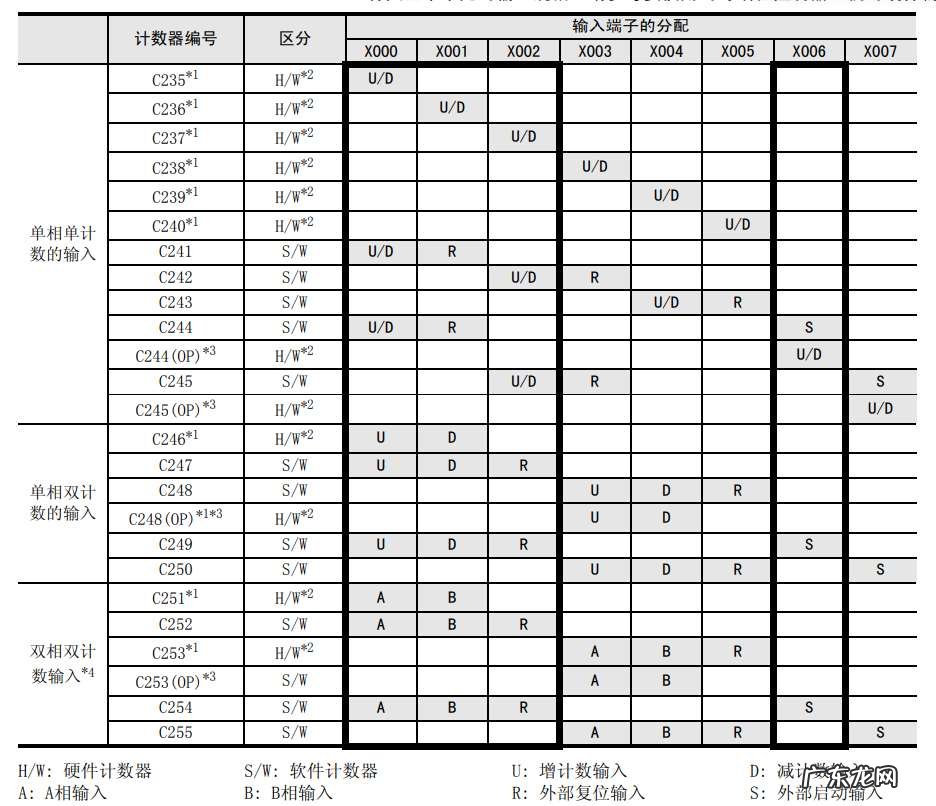
三菱FX PLC中高速计数器输入端参考如下:
- 三菱PLC常见问题 三菱PLC控制器中FOR循环指令的使用方法
- ZRN初级、中级、高级使用 三菱PLC原点回归案例
- 三菱PLC中DRVI应用案例 三菱PLC中定位指令DRVA使用案例
- PLC设置伺服驱动参数 PLC控制伺服电机运动的完整案例
- CC-Link主站模块相关认识 三菱PLC的CC-LINK的案例应用
- 60秒学会PID调节 三菱PLC的PID指令的经典用法及案例详解
- 计数器中断,定时器,输入中断 三菱PLC中断指令方法图解
- 完整PLC程序是几个部分组成 自动化PLC程序编程万能模板
- vivo退出安全模式指令
- 指令再审的法院会怎么判 指令再审发给什么法院
特别声明:本站内容均来自网友提供或互联网,仅供参考,请勿用于商业和其他非法用途。如果侵犯了您的权益请与我们联系,我们将在24小时内删除。